W14 <<
Previous Next >> W15
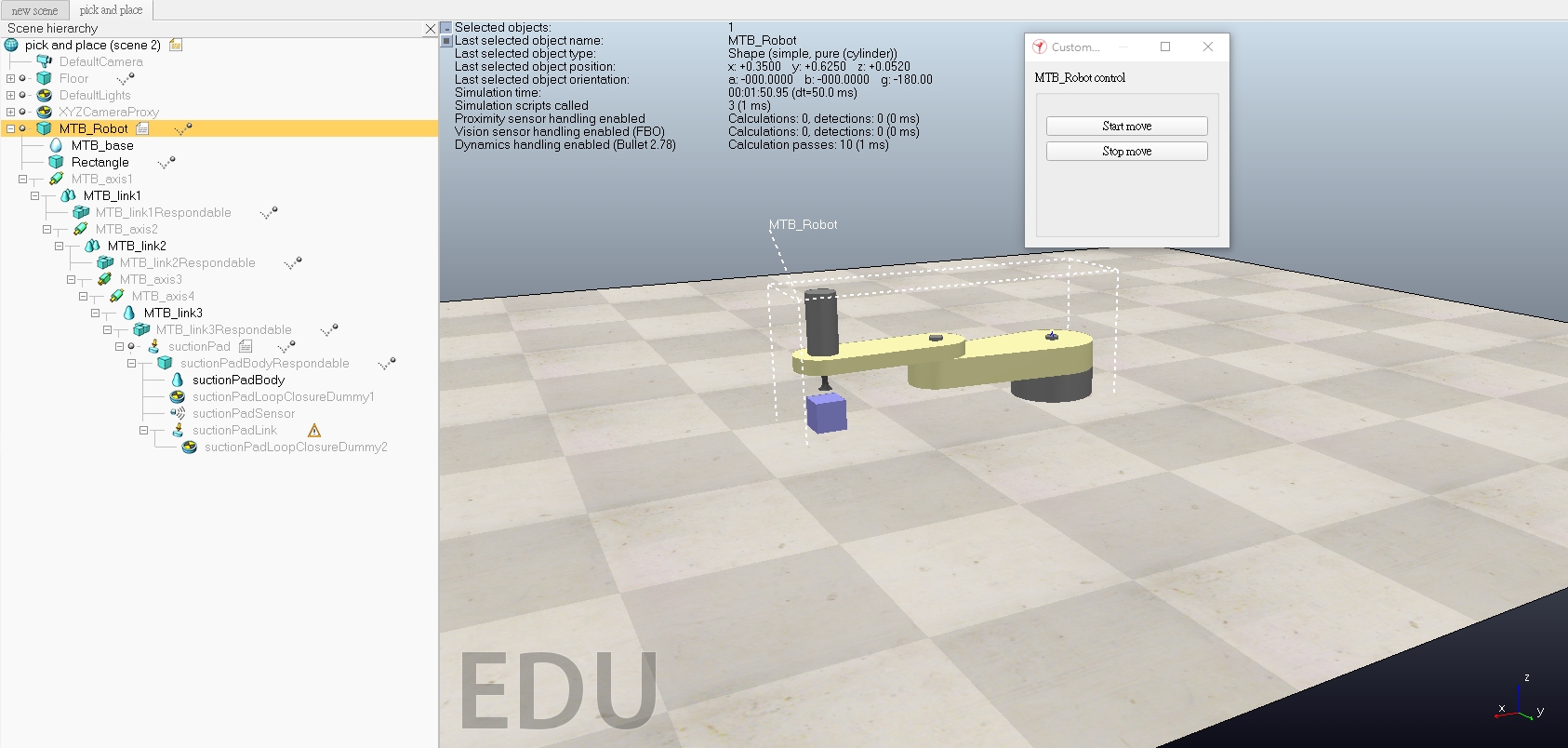
MTB_Robot
組長40823131先做出手臂程式,我再和組長想出要如何在coppeliasim內新增UI介面,但介面操控上還有一些問題需要改進。
場景檔:
W14GUI場景檔(6/10製作)
手臂程式:(沒有UI介面)
function sysCall_init()
corout=coroutine.create(coroutineMain)
end
function sysCall_actuation()
if coroutine.status(corout)~='dead' then
local ok,errorMsg=coroutine.resume(corout)
if errorMsg then
error(debug.traceback(corout,errorMsg),2)
end
else
corout=coroutine.create(coroutineMain)
end
end
function movCallback(config,vel,accel,handles)
for i=1,#handles,1 do
if sim.getJointMode(handles[i])==sim.jointmode_force and sim.isDynamicallyEnabled(handles[i]) then
sim.setJointTargetPosition(handles[i],config[i])
else
sim.setJointPosition(handles[i],config[i])
end
end
end
function moveToConfig(handles,maxVel,maxAccel,maxJerk,targetConf,enable)
local currentConf={}
for i=1,#handles,1 do
currentConf[i]=sim.getJointPosition(handles[i])
targetConf[i]=targetConf[i]*math.pi/180
end
sim.moveToConfig(-1,currentConf,nil,nil,maxVel,maxAccel,maxJerk,targetConf,nil,movCallback,handles)
if enable then
sim.writeCustomDataBlock(gripperHandle,'activity','on')
else
sim.writeCustomDataBlock(gripperHandle,'activity','off')
end
end
function coroutineMain()
modelBase=sim.getObjectHandle(sim.handle_self)
gripperHandle=sim.getObjectHandle('suctionPad')
modelName=sim.getObjectName(modelBase)
motorHandles = {}
for i=1,4,1 do
motorHandles[i]=sim.getObjectHandle('MTB_axis'..i)
end
local vel=60
local accel=10
local jerk=10
local maxVel={vel*math.pi/180,vel*math.pi/180,vel*math.pi/180,vel*math.pi/180}
local maxAccel={accel*math.pi/180,accel*math.pi/180,accel*math.pi/180,accel*math.pi/180}
local maxJerk={jerk*math.pi/180,jerk*math.pi/180,jerk*math.pi/180,jerk*math.pi/180}
moveToConfig(motorHandles,maxVel,maxAccel,maxJerk,{0,0,0,0},true)
moveToConfig(motorHandles,maxVel,maxAccel,maxJerk,{0,0,1.9,0},true)
moveToConfig(motorHandles,maxVel,maxAccel,maxJerk,{0,0,-1.9,0},true)
moveToConfig(motorHandles,maxVel,maxAccel,maxJerk,{-160,-43.5,0,203.5},false)
moveToConfig(motorHandles,maxVel,maxAccel,maxJerk,{160,43.5,0,203.5},false)
moveToConfig(motorHandles,maxVel,maxAccel,maxJerk,{160,43.5,1.90,-203.5},true)
moveToConfig(motorHandles,maxVel,maxAccel,maxJerk,{160,43.5,-1.90,-203.5},true)
end
手臂程式:(包含UI介面)
function sysCall_init()
--Notes can refer to the previous chapter
xml = [[
<ui closeable="true" onclose="closeEventHandler" resizable="true" size="220,200">
<label text="MTB_Robot control" wordwrap="true" />
<group>
<button text="Start move" onclick = "Start_move" />
<button text="Stop move" onclick = "Stop_move" />
<stretch />
</group>
</ui>
]]
ui=simUI.create(xml)
--ui=simUI.create(xml)
Start_flag = false
Stop_flag = false
modelBase=sim.getObjectHandle(sim.handle_self)
gripperHandle=sim.getObjectHandle('suctionPad')
modelName=sim.getObjectName(modelBase)
motorHandles = {}
local vel=10
local accel=10
local jerk=10
local maxVel={vel*math.pi/180,vel*math.pi/180,vel*math.pi/180,vel*math.pi/180}
local maxAccel={accel*math.pi/180,accel*math.pi/180,accel*math.pi/180,accel*math.pi/180}
local maxJerk={jerk*math.pi/180,jerk*math.pi/180,jerk*math.pi/180,jerk*math.pi/180}
end
function closeEventHandler(h)
sim.addStatusbarMessage('Window '..h..' is closing...')
simUI.hide(h)
end
function Start_move(h)
Start_flag = true
end
function Stop_move(h)
Stop_flag = true
end
function moveToConfig(handles,maxVel,maxAccel,maxJerk,targetConf,enable)
local currentConf={}
for i=1,#handles,1 do
currentConf[i]=sim.getJointPosition(handles[i])
targetConf[i]=targetConf[i]*math.pi/180
end
sim.moveToConfig(-1,currentConf,nil,nil,maxVel,maxAccel,maxJerk,targetConf,nil,movCallback,handles)
if enable then
sim.writeCustomDataBlock(gripperHandle,'activity','on')
else
sim.writeCustomDataBlock(gripperHandle,'activity','off')
end
end
function sysCall_actuation()
if Start_flag then
for i=1,#handles,1 do
if sim.getJointMode(handles[i])==sim.jointmode_force and sim.isDynamicallyEnabled(handles[i]) then
sim.setJointTargetPosition(handles[i],config[i])
else
sim.setJointPosition(handles[i],config[i])
end
end
end
if Stop_flag then
sim.setJointTargetPosition('MTB_axis1',0)
end
end
function movCallback(config,vel,accel,handles)
end
function sysCall_cleanup()
-- do some clean-up here
simUI.destroy(ui)
end
吸盤程式:
function sysCall_init()
modelBase=sim.getObjectHandle(sim.handle_self)
s=sim.getObjectHandle('suctionPadSensor')
l=sim.getObjectHandle('suctionPadLoopClosureDummy1')
l2=sim.getObjectHandle('suctionPadLoopClosureDummy2')
b=sim.getObjectHandle('suctionPadBodyRespondable')
sim.setLinkDummy(l,-1)
sim.setObjectParent(l,b,true)
m=sim.getObjectMatrix(l2,-1)
sim.setObjectMatrix(l,-1,m)
suctionPadLink=sim.getObjectHandle('suctionPadLink')
local gripperBase=sim.getObjectHandle(sim.handle_self)
infiniteStrength=true
maxPullForce=3
maxShearForce=1
maxPeelTorque=0.1
end
function sysCall_cleanup()
sim.setLinkDummy(l,-1)
sim.setObjectParent(l,b,true)
m=sim.getObjectMatrix(l2,-1)
sim.setObjectMatrix(l,-1,m)
end
function sysCall_sensing()
parent=sim.getObjectParent(l)
local on=sim.readCustomDataBlock(modelBase,'activity')=='on'
if not on then
if (parent~=b) then
sim.setLinkDummy(l,-1)
sim.setObjectParent(l,b,true)
m=sim.getObjectMatrix(l2,-1)
sim.setObjectMatrix(l,-1,m)
end
else
if (parent==b) then
index=0
while true do
shape=sim.getObjects(index,sim.object_shape_type)
if (shape==-1) then
break
end
local res,val=sim.getObjectInt32Parameter(shape,sim.shapeintparam_respondable)
if (shape~=b) and (val~=0) and (sim.checkProximitySensor(s,shape)==1) then
-- Ok, we found a respondable shape that was detected
-- We connect to that shape:
-- Make sure the two dummies are initially coincident:
sim.setObjectParent(l,b,true)
m=sim.getObjectMatrix(l2,-1)
sim.setObjectMatrix(l,-1,m)
-- Do the connection:
sim.setObjectParent(l,shape,true)
sim.setLinkDummy(l,l2)
break
end
index=index+1
end
else
-- Here we have an object attached
if (infiniteStrength==false) then
-- We might have to conditionally beak it apart!
result,force,torque=sim.readForceSensor(suctionPadLink) -- Here we read the median value out of 5 values (check the force sensor prop. dialog)
if (result>0) then
breakIt=false
if (force[3]>maxPullForce) then breakIt=true end
sf=math.sqrt(force[1]*force[1]+force[2]*force[2])
if (sf>maxShearForce) then breakIt=true end
if (torque[1]>maxPeelTorque) then breakIt=true end
if (torque[2]>maxPeelTorque) then breakIt=true end
if (breakIt) then
-- We break the link:
sim.setLinkDummy(l,-1)
sim.setObjectParent(l,b,true)
m=sim.getObjectMatrix(l2,-1)
sim.setObjectMatrix(l,-1,m)
end
end
end
end
end
end
W14 <<
Previous Next >> W15